特許で三角比はどのように使われているか(レーザープリンター)
【発明が解決しようとする課題】※抜粋
| 走査光学系の場合、感光体には、角度がついて入射されるため、測定位置が光軸方向にわずかにずれただけでも、光束の位置測定誤差は大きくなる。例えば、端の像高では、光軸方向に1mm手前に挿入され、入射角度が20°の場合、測定される主走査方向の光束位置は、 1000×tan20°=364μm と非常に大きな測定誤差が生じるという不具合がある。 |
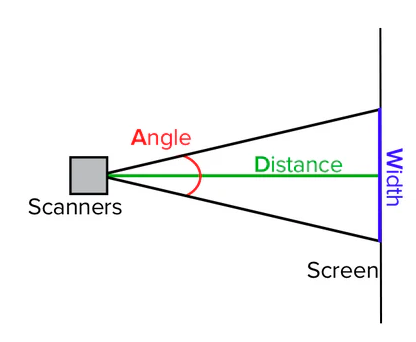
これを理解するのに下記企業サイトの「教育」ページが参考になったので画像を引用しました。この図から、光が斜めに動くほど(角度が変われば)、スクリーン上の横方向位置(画像幅)が大きく変わることがわかります。
また、 角度と位置は tanθ でつながっている、ということもよくわかります。
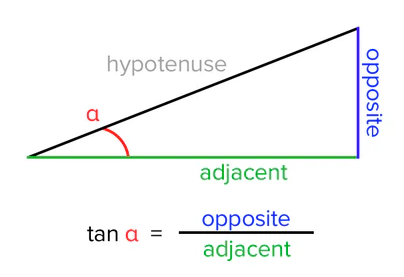
この図の三角形の上半分を取り上げると、直角三角形になっています。
三角比の公式から、tanθと隣辺の長さがわかれば、対辺の長さが分かります。
「1 mm手前に測定位置がずれる」というのは、レーザーの「当たりどころ(測る面の位置)」が、感光体面より手前にずれたという意味です。
私は最初、発光源(レーザーダイオード)側が1 mm左にずれたのかな、と思ったのですが、文面に「測定位置が光軸方向にわずかにずれた」とあるので、逆でした。
レーザーの当たり先(ターゲット面)が、感光体面 (正しい位置) ではなく、その手前の「ズレた面」になっている。
つまり、レーザーが本来到達すべき「感光体の表面」ではなく、その1 mm手前の位置で光束位置を測ってしまうと誤差が出るということを言っていました。
ちなみに光束とは、光源全体の明るさを示すものです。光源からはいくつもの光の線が出ていますが、これらが集まったものを光束と呼びます。
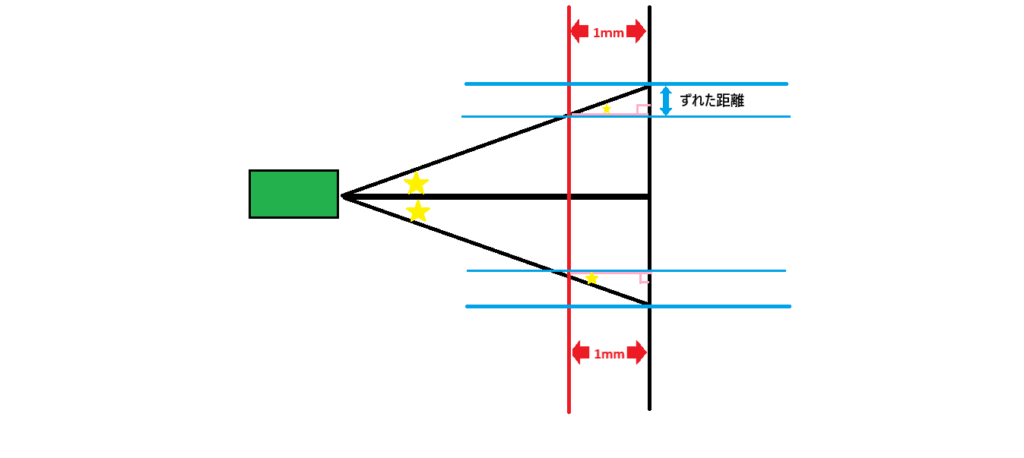
上の図から、本来の位置(感光体の表面:黒線)より1mm手前に測定位置がずれる(赤線)と、画像の幅もずれてしまうことがわかります。このずれた距離を計算で出すと、三角比の公式より
なので、
対辺 = 隣辺 × tanθ
角度θ(図の星印)の隣辺は1mm、例では入射角が20°です。
三角関数表より、tan(20°) ≈ 0.3640
1 mm × tan20° ≈ 0.364 mm(=364 μm)
ここでは 1 mm を 「1,000 μm」 に単位変換しています。
1 mm = 1,000 μm
→ 1mm × tan20°
→ 1,000 μm × tan20°
これで文中の「1000×tan20°=364μm」になりました。
つまり
「レーザーが斜めに入射すると、前後に 1 mm 測定位置がずれただけで、横方向に 364 μm(0.364 mm)もズレてしまう」のが問題であるといっています。
大きさがピンとこないので調べてみると、印刷で 364 μm は致命的なようで、1 画素がおおよそ(≈ 50~100 μm 相当)らしいので、それよりはずっと大きいことになります。
「なぜ測定位置がずれるのか?」
先ほどの課題(抜粋)の前後文を読んでみます。
| 特開2002-19184号に開示の従来例では、感光体の直前に二次元受光センサーアレイや反射型ホログラム部材を挿入し、主走査方向光束位置ずれと副走査方向光束位置ずれの測定を行っているが、実際の感光体位置での測定を行なうことができない。走査光学系の場合、感光体には、角度がついて入射されるため、測定位置が光軸方向にわずかにずれただけでも、光束の位置測定誤差は大きくなる。例えば、端の像高では、光軸方向に1mm手前に挿入され、入射角度が20°の場合、測定される主走査方向の光束位置は、 1000×tan20°=364μm と非常に大きな測定誤差が生じるという不具合がある。また、二次元受光センサーアレイの挿入方法やその挿入スペースについて言及されていないが、これらをレーザプリンタの走査ユニットや感光体が組み付けられた状態で精度良く挿入して位置決めすることは、非常に難しいという不具合もある。」 |
この従来例の特許はまだ読めていませんが、どうやら測定装置(センサーアレイやホログラム部材)が、「感光体そのものの位置」に置けないため、どうしても 「感光体より手前に挿入するしかない」状態なのが原因のようです。
その「手前に置かれた距離」というのが=測定位置のずれに繋がっている、という話でした。
なぜ感光体の位置におけないのか?
それは、 感光体は筒状で回転しているため、この上に センサーを置くことが不可能だからです。
それに、感光体ドラム周りには様々な部品が配置されています。
- LSU(レーザ走査ユニット)
- 帯電器
- 現像器
- 転写ベルト
- 間紙ローラ
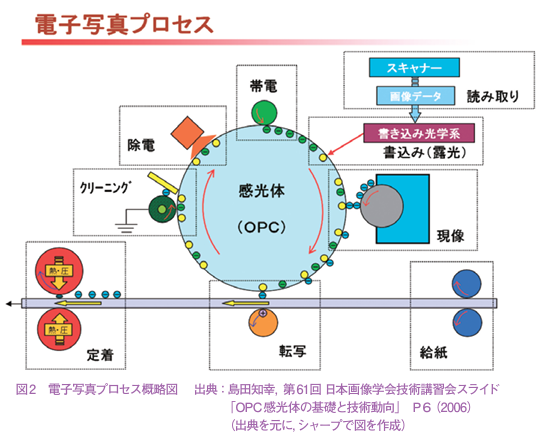
光束位置を測るセンサーも数 mm の厚みがあるようなので、 物理的に感光体の表面に重ねることは不可能です。
なので、「感光体表面(本来測りたい面)」ではなく「その手前(センサーが入る範囲)」に置くしかないのですね。
もう少しこの特許を読み進めてみたいと思います。





コメント